

中空シャフトの新しい加工技術
ラジアルフォージング
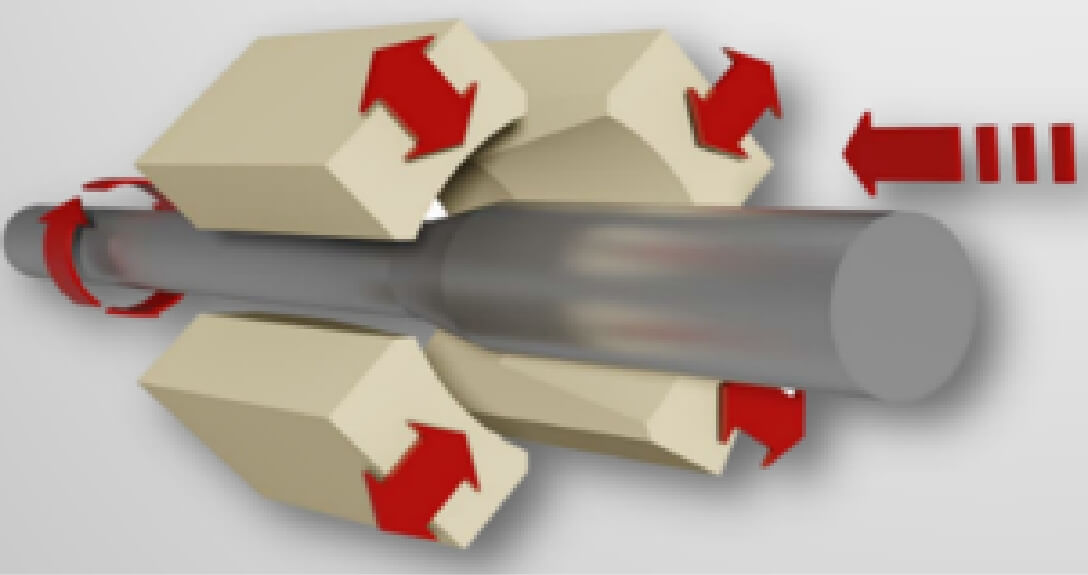
ラジアルフォージングとは?
・4つのハンマーで製品の外周方向(Radial)から鍛造(Forging)する塑性加工方法
・内径に芯金(mandrel)を挿入し内外径同時に成形する
・熱間(1100~1250℃)温間(600~850℃)冷間(常温)どの温度帯でも鍛造可能
・ハンマー等の位置を機械加工同様にNC制御できる
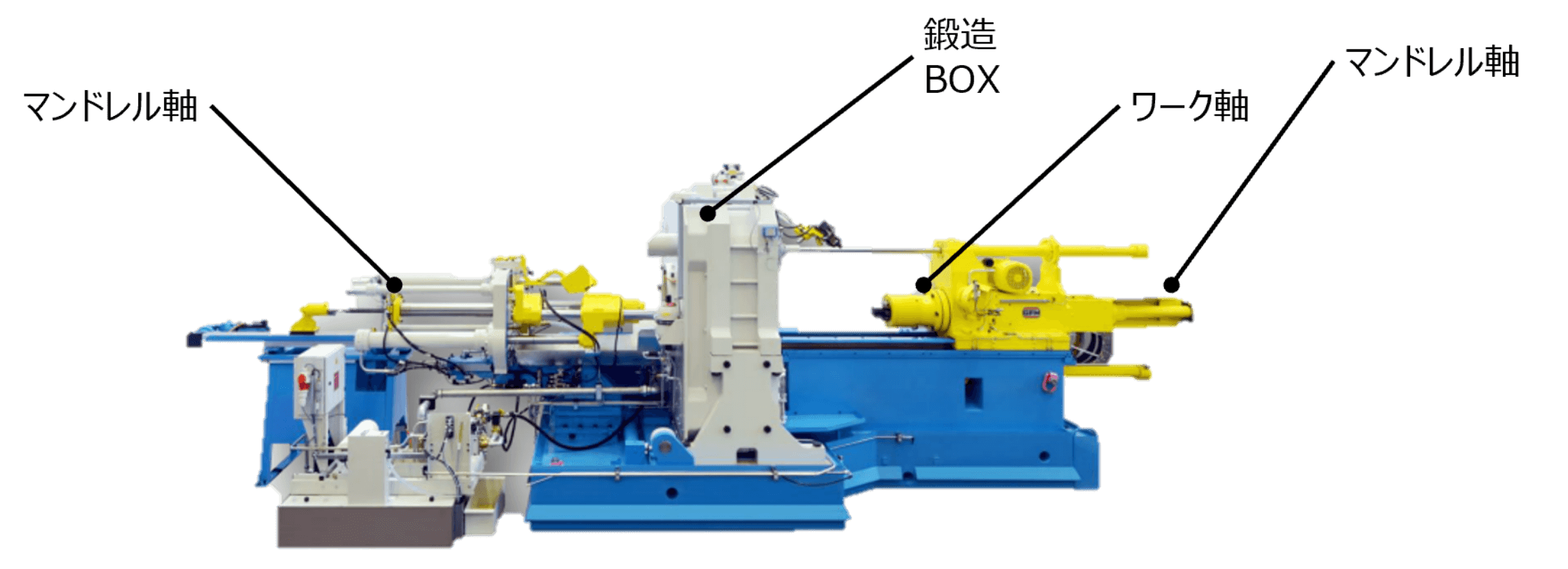
中空シャフト ラジアルフォージングの紹介

AMR(自立走行搬送ロボット)
AMR自動搬送ロボットってなに?
協働ロボットを搭載した※AMRを採用する事でヒト作業に依存せず、人の介入も任意に可能な、次世代のモデルラインとして構築しています。
※AMR(Autonomous Mobile Robot)


{source_type=html, embed_html=, supported_oembed_types=[video]}
担当部署の紹介

MUV(マイクロ・ユーティリティ・ヴィークル)の研究開発
MUVって?
MUV(通称:クロスケ)は
・集配所〜⾃宅への配送
・⾃転⾞や三輪バイクでは対応できない荷物の配送
・その他、⽇常のちょっとした⾜として
など、今後ニーズの⾼まる、⾞検・⾞庫証明不要のミニカーカテゴリの電気⾃動⾞です

何を造っているの?
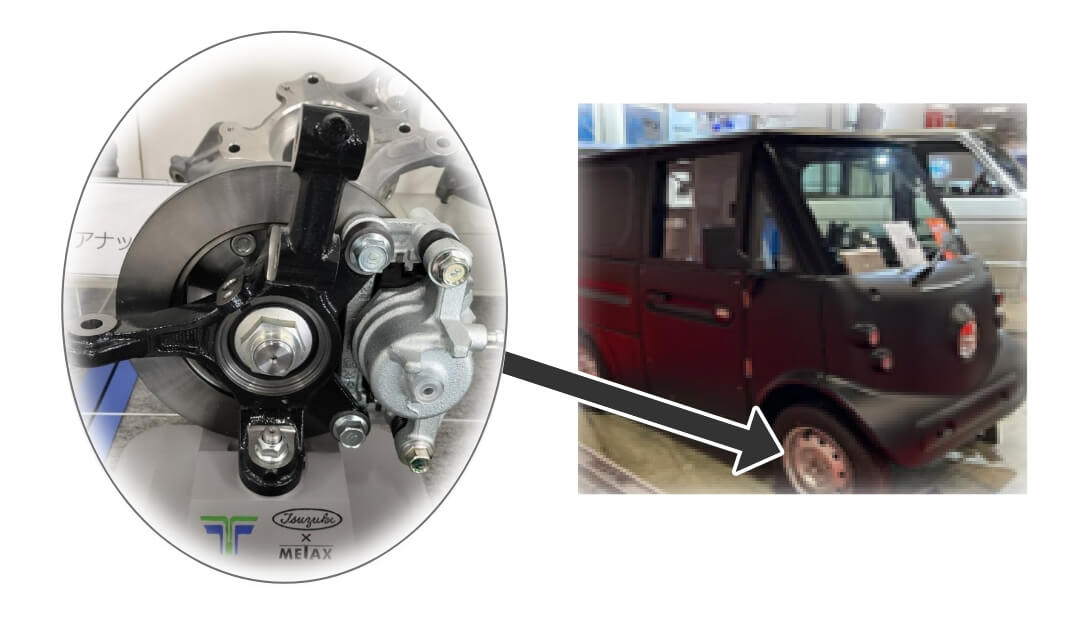
・自社で部品の設計・開発へ
超小型EV技術研究組合に参画しサスペンション部品を自社開発。従来の精密加工技術に、設計・開発能力が加わりました。
超⼩型EV技術研究組合から、nicomobiへ
☐nicomobiについて詳しくは↓
nicomobi ‒ 笑顔をつくるモビリティ
☐クロスケ インスタグラム↓
https://www.instagram.com/kurosuke_xk/


ミニトマト自動収穫ロボットの開発
ミニトマト自動収穫機って?
ハウスの中を行き来する自動収穫ロボットは、
1.AIが収穫可能なミニトマトを検知し
2.まだ収穫できないミニトマトは避け
3.ロボットアームの先端についたハサミで収穫
という、ヒトに代わる働きを実現するものです。
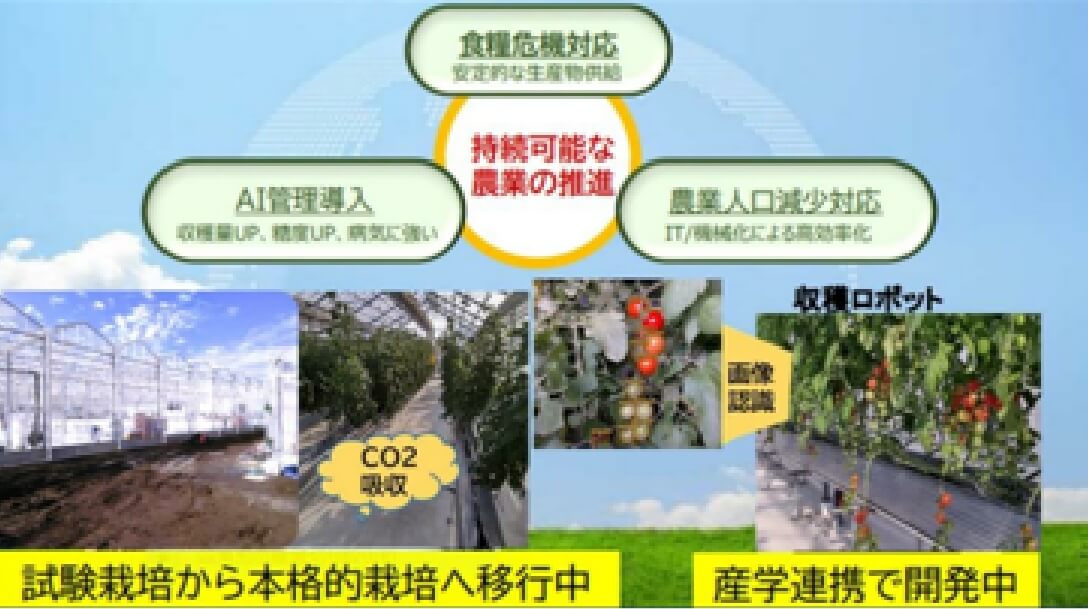
どうして開発に至ったの?
社会問題になっている「農業人口の減少」を補うロボットを開発したい、という想いから、人工知能活用の知見によるソフト面とロボットアームの制作というハード面の開発に着手しました。
関連プロジェクトの紹介


TSUZUKIで夢を叶えよう!
Let’s Start Nagano Life with TSUZUKI
もっとTSUZUKIを知る





Contact
採用に関するお問い合わせ



お電話かメールにて、
お気軽に問い合わせください!
お問い合わせ先:総務課採用担当まで
受付時間 平日9:00〜17:00